My Journey
First Year (2023)
first half this year is my engineering first year second semester, second half is second year first semester My journey into electronics and robotics began in my first year of engineering when I visited Hyderabad to purchase my first Arduino Uno and some basic electronic components. With these tools, I started experimenting, learning the basics of circuits, and exploring programming.
Experimenting with Arduino Uno for the first time(10/01/2023)
Playing Star Wars music with Arduino and an old speaker(10/01/2023)
Learning to control a servo motor with Arduino(14/01/2023)
Tesla Coil or Slayer exiter circuit experiment(24/02/2023)
Amplifier using op-amp (didn't record the working one) (29/07/2023)
Drawing a random pattern with laser(24/04/2023)
IR sensor(sensor)+servo(actuator) = smart_dustbin(product) 24/04/2023
wifi controller car(09/09/2023)
mini drone testing (14/08/2023)
esc calibration(02/11/2023)
Transistor flip-flop using BC547(02/06/2023)

Opened an amplifier to see and explore the circuit(09/08/2023)
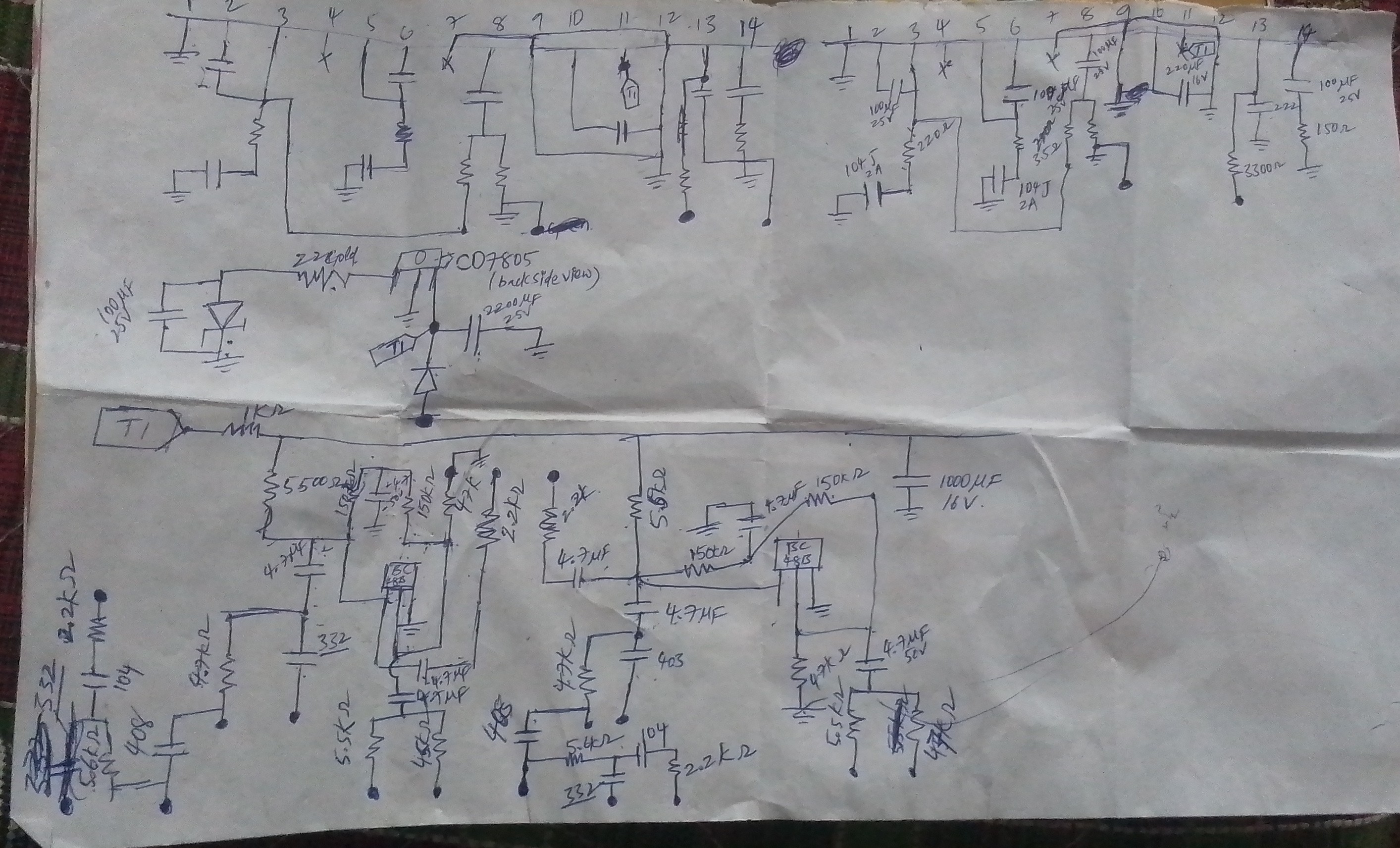
Made the schematics of the amplifier using the traces on the board and a multimeter(26/08/2023)
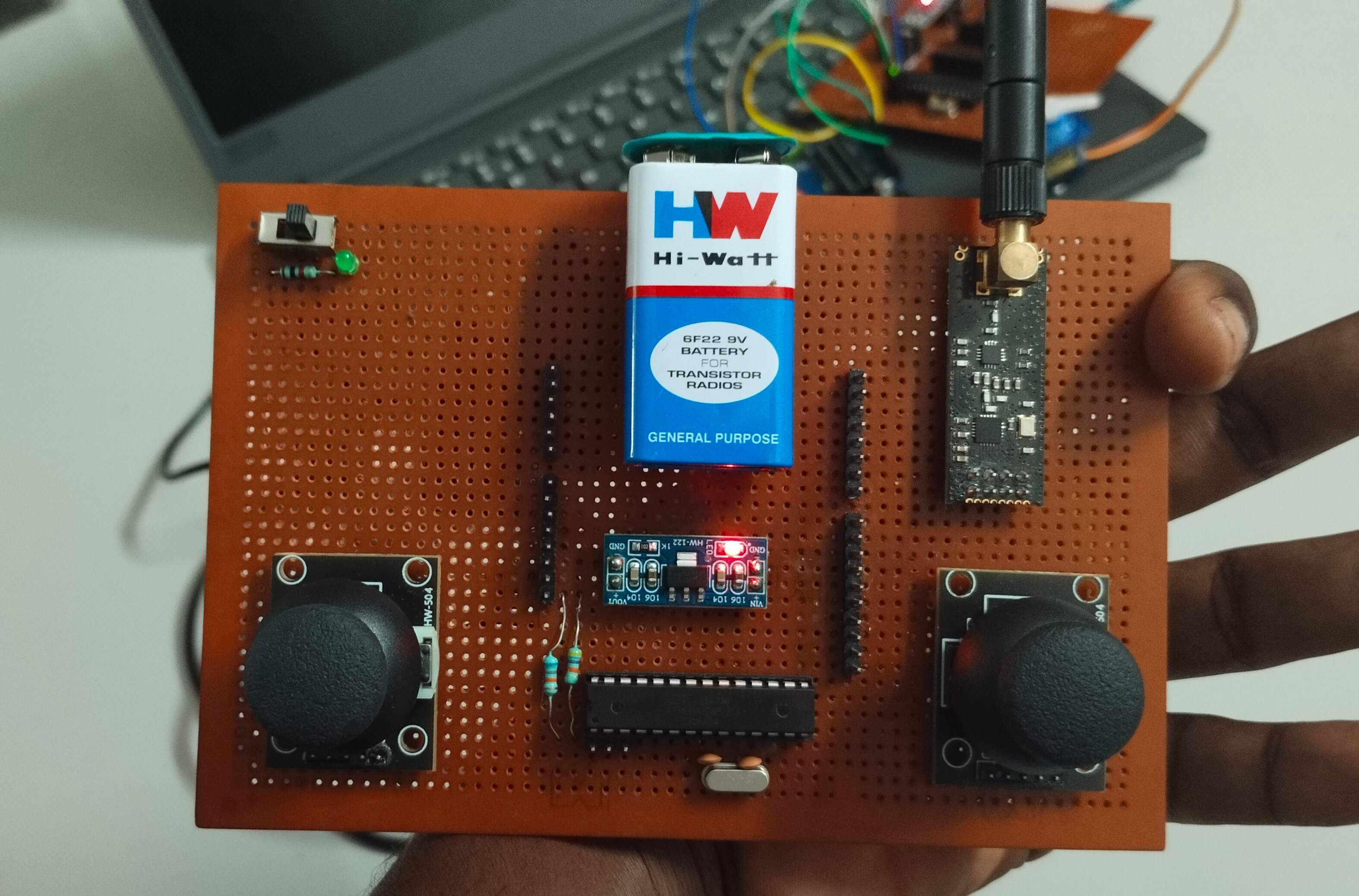
transmitter(25/12/2023)
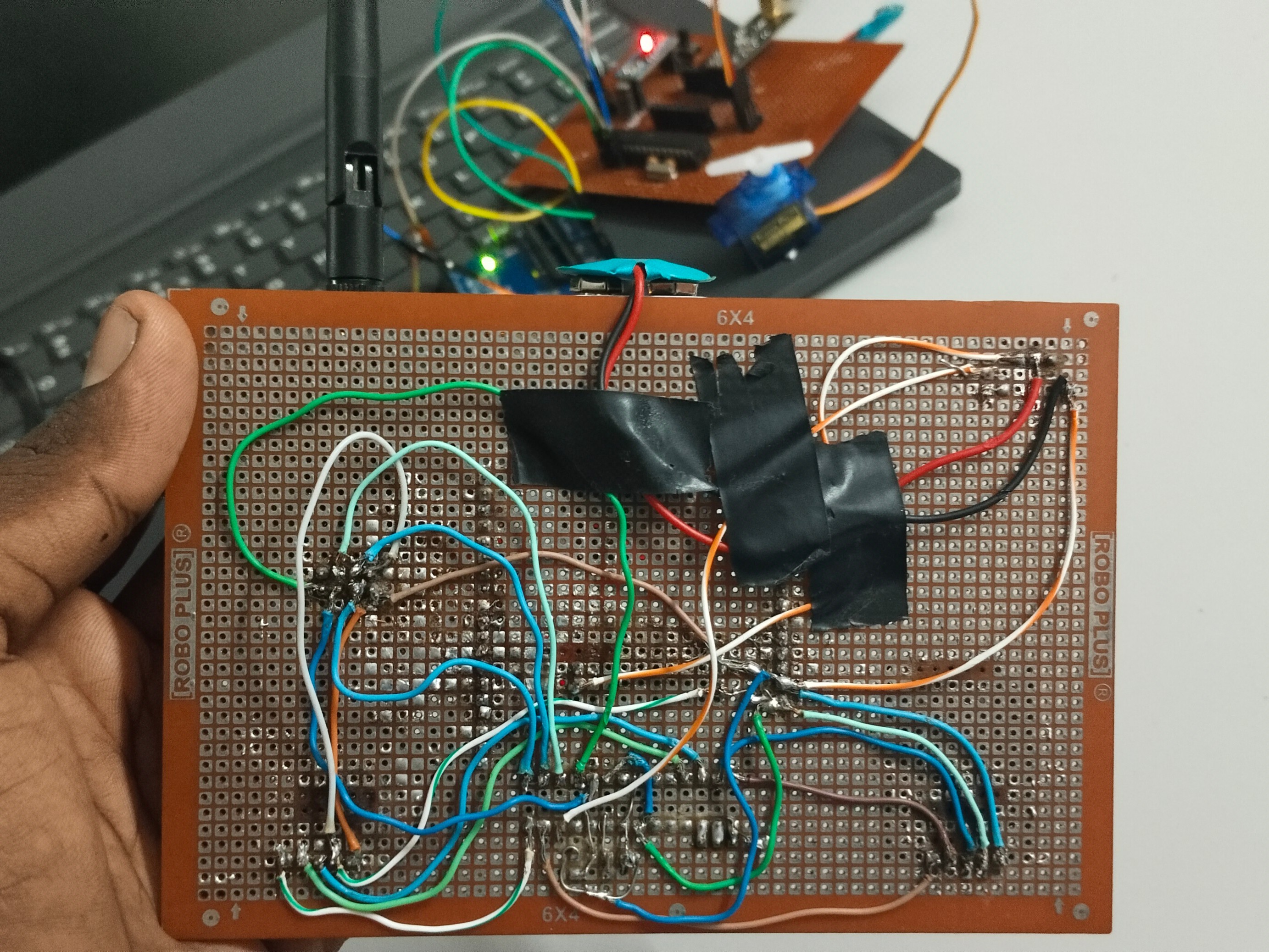
transmitter backside(25/12/2023)
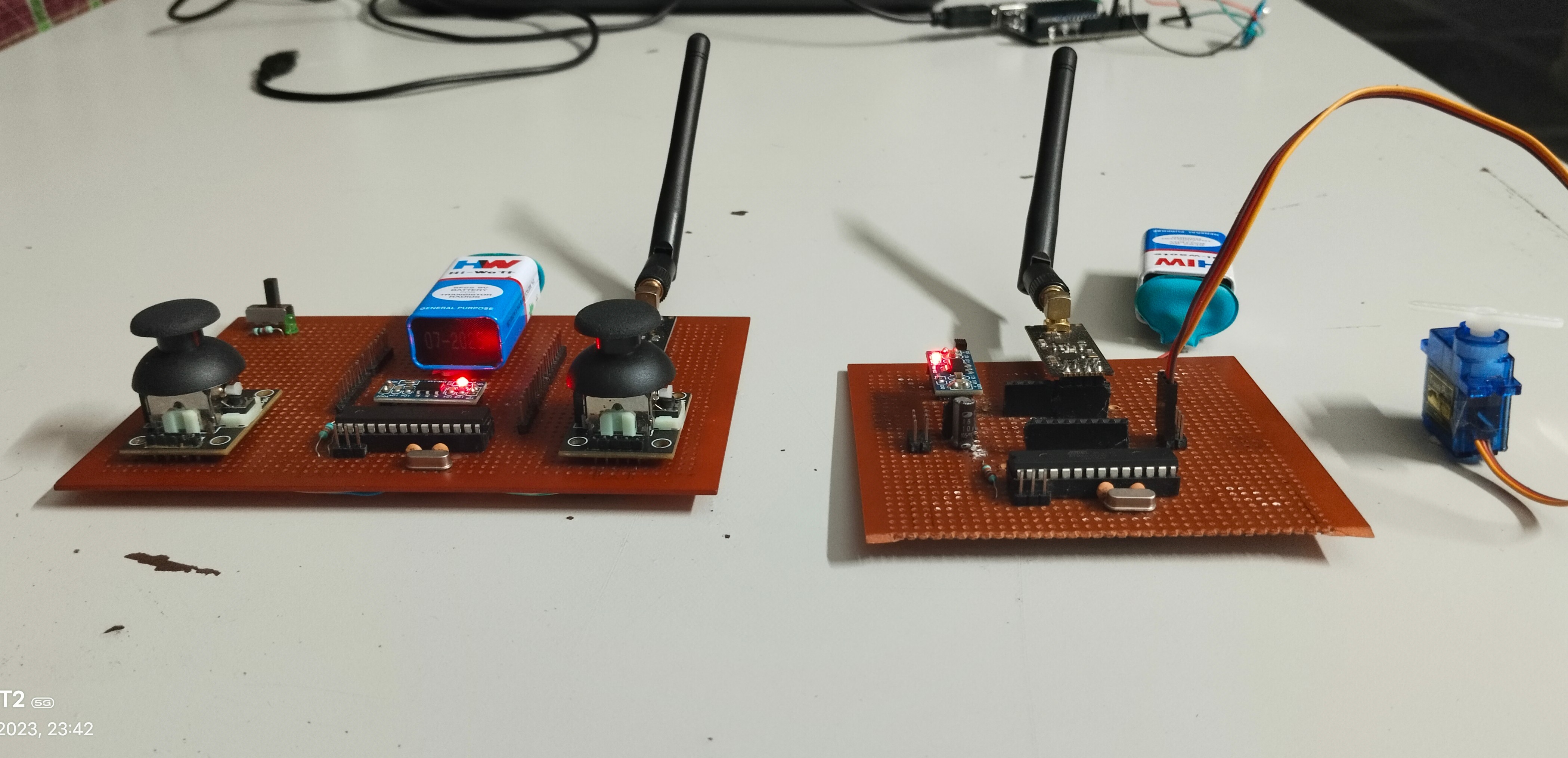
transmitter and reciever(25/12/2023)
One of my earliest experiments was blinking an LED, which gave me immense satisfaction and motivated me to dive deeper. I also built a simple music player using Arduino and learned to control servos, basic electronic circuits, which helped me with building and debugging circuits, designing PCBs, programming, and sparked my interest in robotics.
Second Year (2024)
first half this year is my engineering first year second semester, second half is second year first semester. As I progressed, I ventured into more complex projects like creating a self-balancing robot and working on a drone. These projects taught me essential concepts like PID tuning, ROS2 integration, and sensor fusion. My participation in competitions like the NXP AIM and ROBOTRAC provided valuable hands-on experience.
drone pid tuning and testing(15/01/2024)
line-following robot for ROBOTRAC(15/02/2024)
self-balancing robot(26/05/2024)
self-driving car simulation in gazebo(31/07/2024)
nxp aim regional final(5/08/2024)
image classifier- mini project(29/11/2024)
b3rb buggy testing in our lab(29/11/2024)
Weighing machine for rocket motor thrust measurement (09/03/2024)

3d printed gripper(08/03/2024)

b3rb buggy by nxp, assembled(12/08/2024)

barath aeroplane project, im the electronics guy in that(04/09/2024)

buggyrace competition like nxp competition but we organized in our compus(14/09/2024)

navqplus(computer) and canhubk3(controller) from b3rb buggy(13/08/2024)
robotic arm(10/03/2024)
During these years, I also explored IoT projects, designing PCBs and flight controllers, and collaborated with a team to develop a self-driving car simulation using tools like Gazebo and NavQPlus.
Current Focus
Currently, I am delving into AI and ML, reinforcement learnging, control systems, applying these technologies to image processing tasks, navigation, multi robot coordinations in robotics. My latest project involves navigating a drone in mars terrain without GPS/GNSS. This project is for IRoC(Isro Robotics Challenge 2025)
"Every small step forward adds to the foundation of big achievements."